")

������Q�����Ƽ�(�V��)����˾
(li��n)ϵ�ˣ�����������
(li��n)ϵ�֙C(j��)��
�̶��Ԓ��
��I(y��)�]�䣺77250574@qq.com
(li��n)ϵ��ַ���V������Ӆ^(q��)�Ė|�|·19̖(h��o)A520��
�]����
(li��n)ϵ�ҕr(sh��)��Ո(q��ng)�f���ھ��|�W(w��ng)�Ͽ����ģ��x�x��

Ʒ�ƣ��ձ�NTS
��ͣ���������
��̖(h��o)��MLC-200N
�ذ���λ�����ƃɷN��ʽ����ȡ�����o�����b�˃x����
XY����ķ������ԙz�y������ɔ_С�����ԑ�(y��ng)�����w�C(j��)�ٿv�U�IJٿv����
|
�~������ |
200N |
|
�~��ݔ�� |
��0.5mV/V���� |
|
�Ǿ��� |
1��R.O. |
|
���� |
1��R.O. |
|
ݔ��/ݔ����� |
350����1�� |
�����ǡ�MLC-200N���a(ch��n)ƷԔ��(x��)��Ϣ�������(du��)���������� MLC-200N���ăr(ji��)�S�ҡ���̖(h��o)���DƬ��ʲô�Ɇ���Ո(q��ng)(li��n)ϵ�҂��@ȡ�r(ji��)�a(ch��n)Ʒ�Y�ϡ��DƬ��؛�ڡ��l(f��)؛��ʽ�����g(sh��)����(sh��)�� Ո(q��ng)(li��n)ϵ�������Ƽ���http://www.gzbaizhou.com/��
������������������������������������������������������������������������������������������������������������������������
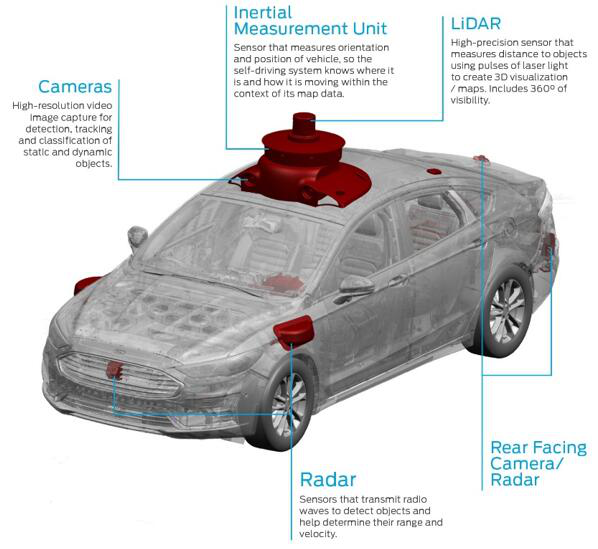
�ķN��͵Ă�������������M���܉��ṩ��ѵăr(ji��)��������LJ��@�Ԅ�(d��ng)�{�܇�v�¼��g(sh��)��(y��ng)�õ���Ҫ���}֮һ���@��(g��)���}��(f��)�s����?y��n)�ֻ�������ڿ���܇�v��ϵ�y(t��ng)�����õ�����֮���ܰ�Ҫ���x�����ڈ�(zh��)���ض��΄�(w��)�Ă�������
�Ԅ�(d��ng)�{�܇�v�����x���������N��Ҫϵ�y(t��ng)�M������һ�N��ؓ(f��)؟(z��)��֪܇�v�܇��ĭh(hu��n)��;�ڶ��N���y�L܇�v�܇��ĭh(hu��n)����Ȼ��ʹ���܉����κΕr(sh��)�g�_����λ��;�����N���ڸ��N��܇������ؓ(f��)؟(z��)�Ԅ�(d��ng)�{�܇�v�ěQ��������
����(j��)��(d��ng)ǰ��Ҫ��܇�S�̺ͱ������������(y��ng)�����M(j��n)�е��о����I(y��)���ƺ��ѽ�(j��ng)�_(d��)��ij�N���R(sh��)�����Ԅ�(d��ng)�{���܇��Ҫ��(y��ng)�ö�N��͵Ă��������Ը�֪���y�L܇�v�܇��ĭh(hu��n)�������ֹ��̎����J(r��n)���Ԅ�(d��ng)�{���܇��Ҫ�������_(d��)���z���^�Լ��������_(d��)(LiDAR)ϵ�y(t��ng)�����@��(sh��)��(j��)��
�@Щ���������g(sh��)������a(b��)�䣬�ڰ����ҹ�����ꡢ�F��ѩ��������ṩ��ѵĿɿ��ԡ���(sh��)�ϣ�F(xi��n)ord(����)��General
Motors(ͨ����܇)��Volkswagen(��)��Nissan(�ծa(ch��n))����Ҫ��܇�S�̵��_�l(f��)�ˆT�ƺ�Ҳ����(du��)�˱�ʾ�J(r��n)�ɣ���?y��n)����������^չʾ�˲��ø��N��͂��������Ԅ�(d��ng)�{���܇��
�����(sh��)�S�̵��Ԅ�(d��ng)�{�ԇ�(y��n)܇�v�������˰����z���^�����_(d��)��LiDAR�ڃ�(n��i)�Ķ�N���������g(sh��)
�z���^�����_(d��)��LiDAR
��(j��)��ķ˹��ԃ��(b��o)����2022���A(y��)Ӌ(j��)�Ԅ�(d��ng)�{���܇�Ј���(y��ng)�õļ������_(d��)�Ј��I�Ռ��_(d��)��16�|��Ԫ�����_(d��)�Ј��I�Ռ��_(d��)��4400�f��Ԫ���z���^�Ј��I�Ռ��_(d��)��6�|��Ԫ��
ͨ�����z���^��(g��u)���˴����(sh��)��܇����ϵ�y(t��ng)�ĺ��ģ������܉�܇�v�܇��h(hu��n)��360��ҕ��(FOV)�������D��(d��ng)Ȼ��Ҳ����ʹ��24GHz�̳����_(d��)(SRR)���Լ�77GHz�l�ε��h(yu��n)�����_(d��)(LRR)ϵ�y(t��ng)����һ���棬LiDARϵ�y(t��ng)���ṩ���h(yu��n)300�ס�360��ҕ��������(n��i)����ֱ��ˮƽ�ֱ��ʸ��_(d��)0.1��Č�(sh��)�r(sh��)3D��(sh��)��(j��)��
�b����܇�v��ʹ�Õr(sh��)��LiDARϵ�y(t��ng)���ԏ�܇�v�܇��̶����Ƅ�(d��ng)�����w���ܼ���3D�c(di��n)�Ɣ�(sh��)��(j��)�����l(f��)��ͽ��՟o��늲����Ǽ�������_(d��)ϵ�y(t��ng)�������cLiDARϵ�y(t��ng)���a(b��)����?y��n)��������������ṩ�ͷ��������w���ٶȺͷ�λ��(sh��)��(j��)���h(yu��n)�����_(d��)���������Ը�ۙ�������w(����ӭ������܇�v)�����̳����_(d��)�������t�����ṩ܇�v�������Ƅ�(d��ng)���w���S����Ϣ����һ���棬�z���^�t���Ԝy�����w�����l(f��)��Ĺ⣬�M(j��n)һ������(qi��ng)܇�v�܇����w�����ļ�(x��)��(ji��)��
�Ԅ�(d��ng)�{�܇�v�����������������͵Ă����������Դ_������һ�N�������Ĺ��м��g(sh��)���ޣ��܉�һ��(g��)�����(g��)�����������ă�(y��u)�����a(b��)����Ȼ������������@�N��������ô���}�����ڱ���_�l(f��)һ�N܇�d̎��ģ�ͣ���̎���ɸ��N���������@�Ĵ�����(sh��)��(j��)��
��(sh��)��(j��)�ں�
̎���@һ�y�}��һ�N�������nj�����܇�v�ϵĶ���(g��)������Դ�Ĕ�(sh��)��(j��)����̎��֮ǰ�ڿ��g�ϡ����Ϻ͕r(sh��)�g���M(j��n)�Ќ�(du��)��(zh��n)�ںϣ��@��(hu��)����һ��(g��)����Ć�(g��)����ϵ�y(t��ng)���@�N��������ʹһ��(g��)�����(g��)܇�d̎��������ij��(g��)������̽�y�����(zh��n)�_�r(sh��)�������Ԅ�(d��ng)�{�܇�v�Ġ�B(t��i)����һ�N���������O(sh��)Ӌ(j��)����(g��)��(d��)���Ă�����̎��ϵ�y(t��ng)��ÿ��(g��)ϵ�y(t��ng)����������֧����ȫ�Ԅ�(d��ng)�{Ȼ�����oՓ�����ķN����������Ҫ�߂��ܡ������ʧЧ�\(y��n)�е�ϵ�y(t��ng)�ܘ�(g��u)���팍(sh��)�F(xi��n)�Ԅ�(d��ng)�{
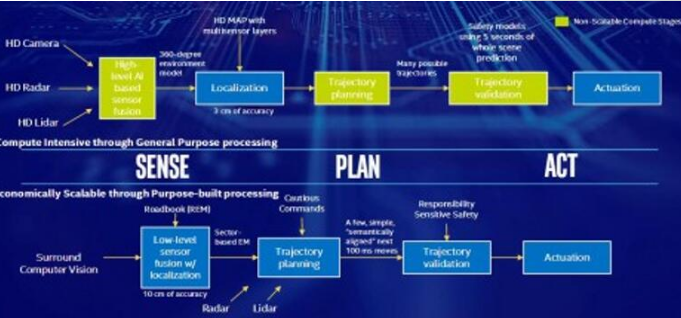
�����Ĺ��̎������_�l(f��)һ�N�Ԅ�(d��ng)�{�܇�v�W(w��ng)�j(lu��)��ԓ�W(w��ng)�j(lu��)���Ԍ�����܇�v�����Ђ������Ĕ�(sh��)��(j��)��һ�N���Q�顰�������ںϡ����^�����M(j��n)�����ϡ��@Щ��������(sh��)��(j��)��܇�v�е���ӿ��Ɔ�Ԫ�u(p��ng)������Ҏ(gu��)��܇�v�����·�������ˌ�(sh��)�F(xi��n)��ȫ�ԺͿɿ��������Ҫ��Ӌ(j��)�㹤�����S�ಢ�й�����̎������ͬ��ɡ�
���^��Intel(Ӣ�ؠ�)/Mobileye�Ĺ��̎��t�����_�l(f��)һ�N��ͬ�ķ�������Ŭ�����������J(r��n)�鲻�ܔU(ku��)չ������ɱ��ܸߵ�һ�N�Ԅ�(d��ng)�{�܇�v����ϵ�y(t��ng)��
Ӣ�ؠ�/Mobileye�����һ�N�����Ĕ�(sh��)�W(xu��)ģ�ͣ��Դ_���Ԅ�(d��ng)�{���܇��ȫ�ķ�ʽ�\(y��n)�С��@�N���Q�顰Responsibility-Sensitive
Safety(RSS)����ģ�ͣ������؟(z��)�κ�֔(j��n)�������ṩ�˾��w�ҿɺ����ą���(sh��)�������x��һ�N����ȫ��B(t��i)����ּ�ڟoՓ����܇�v��ȡ�ηN����(y��ng)���О飬��ֹ�Ԅ�(d��ng)�{�܇�v�ɞ��¹ʵ��T��
������ϵ�y(t��ng)
�����ѽ�(j��ng)չʾ��һ�N�H���z���^���Ԅ�(d��ng)�{���܇����������Ե�һ���֣��������ڹ�˾��(g��u)�������^�ġ��������ࡱ��ϵ�y(t��ng)�С��F(xi��n)�ڣ��������㘋(g��u)��һ��(g��)�ɶ���(g��)��(d��)���O(sh��)Ӌ(j��)�Ă���ϵ�y(t��ng)�M�ɵĂ���ϵ�y(t��ng)�����a(b��)����ڔz���^��ϵ�y(t��ng)������Ҳ���������_(d��)��LiDAR�����Ԕz���^�Ĕ�(sh��)��(j��)�ںό����ڶ�λ܇�v���������_(d��)��LiDAR�Ĕ�(sh��)��(j��)�ںό���Ҏ(gu��)��܇�v܉�E�ĺ���ʹ�á��c����ںρ��Ԕz���^�����_(d��)/LiDAR��ԭʼ��(sh��)��(j��)��ȣ�ÿ��(g��)ϵ�y(t��ng)���܉�����֧����ȫ�Ԅ�(d��ng)�{
���˸Мy܇�v�܇��ĭh(hu��n)��֮�⣬���b���Ԅ�(d��ng)�{�܇�v�ϵĂ�������߀��ؓ(f��)؟(z��)�܇��h(hu��n)���Ĝy�L��ʹ܇�v�܉����κΕr(sh��)�g�_�������ڵ�λ�á�Ŀǰ�ѽ�(j��ng)���õ�һ�N��������ӛ���LiDAR��ǰ���@��3D�c(di��n)���Ԅ�(chu��ng)���؈D��Ȼ��ͨ�^��܇�vLiDAR����Ы@�õ�3D�c(di��n)���c�؈D�ϵ�3D�c(di��n)�M(j��n)�б��^������λ܇�v��λ�á�
��һ�N������Ҳ����Ӣ�ؠ�/Mobileye��֧�ֵķ������dz�����������z���^���ض�ܛ���Ĵ���܇�v����ܛ�����ԙz�y܇�v�܇������x�����w���@�N�������������ڱ����ĵ؈D��(chu��ng)����Ȼ�����ς����ƶˡ�Ȼ�������Ԅ�(d��ng)�{�܇�v����ͨ�^��C�W(w��ng)�j(lu��)�ȬF(xi��n)��ͨ��ƽ�_(t��i)�����@Щ�؈D��(sh��)��(j��)��
�ɱ������������@����˴����Ĕ�(sh��)��(j��)������Ҫ�µ�܇�dӋ(j��)����A(ch��)�O(sh��)ʩ���팍(sh��)�F(xi��n)��Ҏ(gu��)ģ��(sh��)��(j��)��܇�v��(n��i)��ݔ��
��(j��)ABI Research�Ԅ�(d��ng)�{��(j��)������James
Hodgson�Q���ɔz���^�����_(d��)��LiDAR�Լ���������ϵ�y(t��ng)�ȶ�N�������a(ch��n)���Ĕ�(sh��)��(j��)����ÿ8С�r(sh��)���_(d��)��32TB�����˶��x����̎����˸ߔ�(sh��)��(j��)���ʵĻ��A(ch��)�O(sh��)ʩ��Aquantia����������ꑡ�NVIDIA(Ӣ���_(d��))�ʹ���܇�������Ԅ�(d��ng)�{���܇�W(w��ng)�j(lu��)(Networking
for Autonomous Vehicles��
NAV)(li��n)�ˡ�ͨ�^�������@Щ��˾Ӌ(j��)�����Ԅ�(d��ng)�{���܇��(n��i)�����(sh��)ǧ��λ����̫�W(w��ng)��ͬ�r(sh��)��Q�c�����Ϳ��_�����ġ��ɿ����Լ���ȫ��(bi��o)��(zh��n)���P(gu��n)������(zh��n)��
܇�d��(sh��)��(j��)̎��ϵ�y(t��ng)
����˰�ȫ�M(j��n)���(y��n)�C���J(r��n)�C��܇�vӋ(j��)��ܘ�(g��u)�е�܇�dϵ�y(t��ng)���������̎����Ԃ������Ĕ�(sh��)��(j��)����ʹ܇�v�܉��ڸ��N�{������ǡ��(d��ng)�\(y��n)�еĆ��}��܇�v�H�܉��֪��h(hu��n)������(sh��)�F(xi��n)��λ�Dz���ģ���߀����܉�������@ȡ�Ĕ�(sh��)��(j��)�M(j��n)��·��Ҏ(gu��)������(zh��)�С�
�����f�����@�����˹�����(AI)ϵ�y(t��ng)�����Ì�׃��Խ��Խ�ձ飬�˹����܌�ʹ܇�v�܉�@�ÿ��ܰl(f��)���ı������ڽ�ͨ��r�������J(r��n)֪���@�N�ڽ�ͨ��r�ЌW(xu��)��(x��)��ϵ�y(t��ng)�^�̱��Q�顰��ȌW(xu��)��(x��)���������еó��Լ�����Փ���Ķ��ṩһϵ���Є�(d��ng)������Ȼ���������@�N�˹�����ϵ�y(t��ng)���\(y��n)�и��ʆ��}����˘I(y��)���(d��n)�������Ŀɿ��Կ��ܲ���
��ˣ�Mobileye�ȹ�˾�����˹����ܛQ�߽�Q����֮�ϣ�����һ��(g��)�Ϊ�(d��)�ġ��_���Ե�ܛ���ӡ�Mobileye��RSSģ�͌����ȫ�{�������ʽ�������߉�Ͽ��C���Ŀ��(y��n)�Cģ�ͣ����xǡ��(d��ng)?sh��)�푑?y��ng)�����_���Ԅ�(d��ng)�{�܇�v�H������ȫ�ěQ�ߡ���ģ�ͱ���ؓ(f��)؟(z��)���ځ���·��Ҏ(gu��)��ϵ�y(t��ng)�ĽY(ji��)�����(y��n)�C܇�v��܉�E��·��Ҏ(gu��)��ϵ�y(t��ng)�t����܇�v�������@ȡ�Ĕ�(sh��)��(j��)��(chu��ng)���Є�(d��ng)Ӌ(j��)����
��ȫ�(y��n)�C���J(r��n)�C
�@Ȼ���oՓ���Ԅ�(d��ng)�{�܇�v��ʹ�úηNܛ��������Ҫ�M(j��n)���(y��n)�C���J(r��n)�C���Դ_���Ԅ�(d��ng)�{�܇�v�����ěQ���ǰ�ȫ�ġ���(sh��)�ϣ��Ԅ�(d��ng)�{�܇�v���ܕ�(hu��)�������N���ӵĝ�������r�����@�N܇�v���(y��n)�C��ʹ�õ�ܛ�����úηN�m��(d��ng)?sh��)İ�ȫ�ȼ?j��)���漰������(zh��n)�������ǹ��̎����R���������(zh��n)֮һ���e�ǿ��]����ʹ�õ��S���˹�����ܛ��ϵ�y(t��ng)���|(zh��)���ǷǴ_���Եģ���˜yԇ�����y��
��ˣ��mȻһЩ����(y��ng)�̿��ܕ�(hu��)�J(r��n)�鄓(chu��ng)���������Ԅ�(d��ng)�{���܇�ļ��g(sh��)����(zh��n)�ѽ�(j��ng)��Q�����Ԅ�(d��ng)�{����Ȼ��ه�ڏV����ܛ���(y��n)�C���������f�O(ji��n)�ܲ��T������(zh��n)�ˡ�ֱ���@Щ���}Ҳ����Q����ȫ�Ԅ�(d��ng)�{�܇�v����������߀��Ҫ����r(sh��)�g��